پایه تلسکوپ
پایه INO340 یک پایه سمتی-ارتفاعی است. این موضوع به تلسکوپ اجازه می دهد که حجم خیلی کمی را اشغال کند و همین طور مسیرهای بار مستقیمی را از تلسکوپ و از طریق ساختار به پایه فراهم می کند. موتورهایی که برای حرکت دادن تلسکوپ در جهت های سمتی و ارتفاعی استفاده می شوند موتورهای servo خواهند بود که مجهز به فیدبک موقعیت هستند که توسط انکودر ارائه خواهد شد.
سیستم مکانیک تلسکوپ به سه بخش اصلی تقسیم می شود:
- نگهدارنده آینه اولیه
- واحد فوقانی
- پایه تلسکوپ
تلسکوپ بر روی یک پایه بتنی با قطر ۶/۵ متر و ارتفاع ۱۰ متر (۳ متر زیر سطح سایت) نصب می شود. قطر پایه تلسکوپ ۵/۵ متر است که بر روی ۳۶ (leveling wedges) استوار است. سیستم انتقال برق از تلسکوپ برای هر محور، شامل دو موتور گشتاور AC و چرخ دنده می شود. آنها بر عکس هم عمل می کنند تا اثر واکنش دنده ها را حذف کنند. نسبت چرخ دنده (gears ratio) برای محور ارتفاع ۲۵، برای محور سمتی ۲۹ و برای چرخنده ها ۱۵ است. محور سمتی با استفاده از یاتاقان هیدرواستاتیک در جهت محوری و یک بلبرینگ در جهت شعاعی پشتیبانی می شود. محور ارتفاع توسط دو جفت بلبرینگ پشتیبانی می شود که رو به روی یکدیگر و در هر طرف پایه تنظیم شده است.
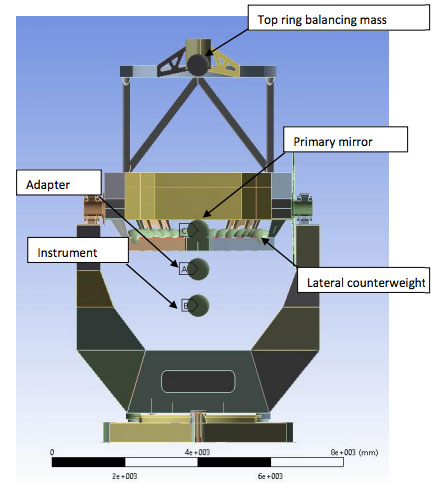
پایه شامل بخش های زیر می شود:پایه شامل بخش های زیر می شود:
- یاتاقان های هیدرواستاتیکی
- چنگک
- لولاها
- بخش مرکزی
- پوشش آینه
- وزنه های تعادل
- بازوهای اتصال دهنده
- خرپا
- حلقه بالایی
- اتصال عنکبوتی
- سیستم حرکت ارتفاعی
- سیستم حرکت سمتی
تیم INO طراحی مکانیکی ساختار تلسکوپ را به طور کامل انجام داده است و به طور مستقیم بر مرحله ساخت نظارت خواهد داشت. در حال حاضر طراحی سازه های مکانیکی تلسکوپ کامل شده است.